عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






Sinolion Pillar Type Manipulator0 pages
Sinolion
SINOLION MACHINERY
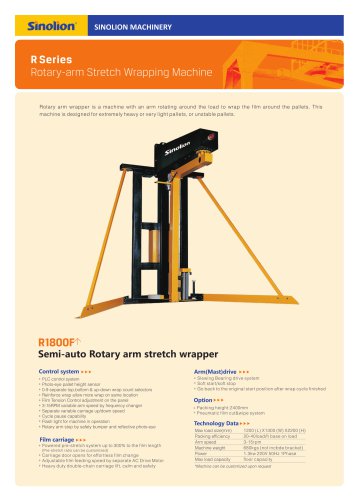
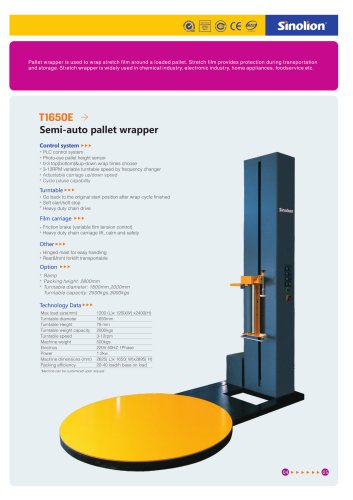
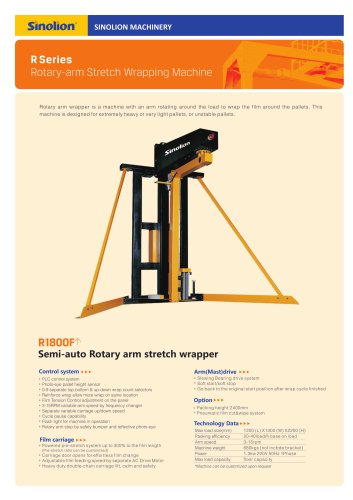
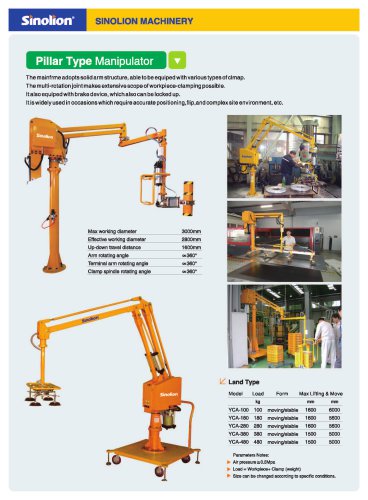
Pillar Type Manipulator
The mainf rme adopts solid arm structure, able to be equiped with various types of clmap.
The multi-rotation joint makes extensive scope of workpiece-clam ping possible.
It also equiped with brake device, which also can be locked up.
It is widely used in occasions which require accurate position ing.f lip, and complex site environment, etc.
Clamp spindle rotating angle
oo 360°
V- Land Type
Model Load
Form Max Lifting & Move
kg
YCA-100 100 moving/stable 1600 6000
YCA-180 180 moving/stable 1600 5600
YCA-280 280 moving/stable 1600 5600
YCA-380 380 moving/stable 1500 5000
YCA-480 480 moving/stable 1500 5000
Parameters Notes:
Air pressure £0,5Mpa
Load = Workpiece+ Clamp (weight)
Size can be changed according to specific conditions.
"