عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






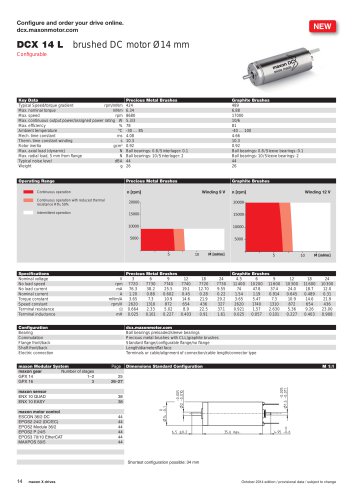
MAXPOS Positioning Controller0 pages

maxon motor control
MAXPOS Positioning Controller Summary
PRECISION
DYNAMIC
SYNCHRONIZATION
MAXPOS 50/5 EtherCAT Slave
The MAXPOS 50/5 is a motion controller for highly dynamic applications and receives motion and
I/O commands from the higher-level EtherCAT master controlling the process. The extremely fast
controllers together with the diverse feedback options provide ideal conditions for operation in
high-performance applications, raising the bar for precision and synchronization. The MAXPOS
50/5 supports CoE (CAN application layer over EtherCAT).
ues to the EtherCAT master. If the PID position
control loop is closed via the EtherCAT master,
CST mode is often used.
Point to point
The “Profile Position Mode” moves the position of
the motor axis from point A to point B. Positioning
is in relation to the axis Home position (absolute)
or the actual axis position (relative).
Position and Speed control with
Feed Forward
The combination of feedback and feed forward
control provides ideal motion behavior. Feed
forward control reduces control error. MAXPOS
supports feed forward for acceleration and
speed.
Speed control
In “Profile Velocity Mode”, the motor axis is
moved with a set speed. The motor axis retains
speed until a new speed is set.
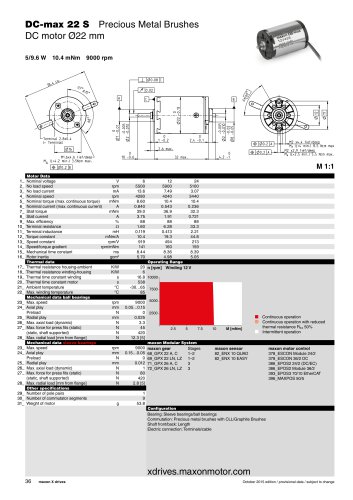
MAXPOS is a modular, digital positioning
controller. It is suitable for permanent magnetactivated DC brushed and brushless (maxon EC)
motors with incremental or absolute encoders
with an operational range of up to 250 W.
A wide range of operating modes allows flexible
use in a variety of fields in drive systems, automation, and mechatronics.
Cyclic Synchronous Position (CSP)
The EtherCAT master executes the path planning and sends the target position cyclically and
synchronously via the EtherCAT network to the
MAXPOS.
The position control loop runs in the MAXPOS.
The MAXPOS delivers the measured actual position, speed and current values to the EtherCAT
master.
358
maxon motor control
1411_Motor_control.indd 358
Cyclic Synchronous Velocity (CSV)
The EtherCAT master executes the path planning and sends the target speed cyclically and
synchronously via the EtherCAT network to the
MAXPOS. The speed control loop runs in the
MAXPOS. The MAXPOS delivers the measured
actual position, speed and current values to the
EtherCAT master. If the PI position control loop
is closed via the EtherCAT master, CSV mode is
often used.
Cyclic Synchronous Torque (CST)
The EtherCAT master executes the path planning and sends the target torque cyclically and
synchronously via the EtherCAT network to the
MAXPOS. The torque (current) control loop runs
in the MAXPOS. The MAXPOS delivers the
measured actual position, speed and current val-
Homing
The “Homing Mode” is for referencing to a special
mechanical position. There is a wide variety of
methods for achieving this.
Feedback options
Two different encoder signals can be evaluated
simultaneously. In a suitable master unit, this
enables dual loop control in order to compensate
for mechanical backlash and elasticity.
A wide range of sensors is permissible: Digital
incremental encoders, analog incremental
encoders (sin/cos), SSI absolute encoders,
(EnDat2.2 and BiSS-C absolute encoders are
planned).
May 2014 edition / subject to change
08.05.14 08:27
"