عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






Multipick handling IRB24000 pages
IRB 34
nnnnIMBIBI
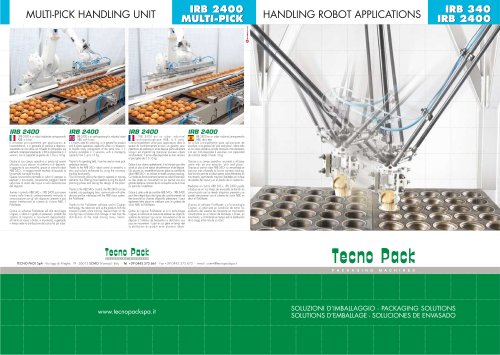
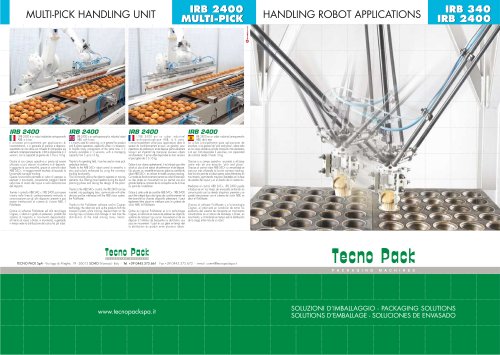
nnnnMULTI-PICK HANDLING UNIT
nnnnI RB 2400
nnnnMULTI-PICK
nnnnHANDLING ROBOT APPLICATIONS
nnnnIRB 2400
nnnnQL'IRB 2400 è un robot industriale antropomorfo
nnnnABB, a 6 assi.
nnnnE utilizzato principalmente per applicazioni di
nnnninscatolamento, o in generale di prelievo e deposito;
nnnnsoprattutto nei casi dove sia richiesto di manipolare più
nnnnelementi contemporaneamente. Infatti è disponibile in 3
nnnnversioni, con la capacità di gestire da 5 fino a 1 ó kg.
nnnnGrazie al suo campo operativo si presta ad essere
nnnnutilizzato su più stazioni di prelievo e di deposito.
nnnnn aggiunta la sua versatilità, grazie al controllo robot
nnnnABB S4C+, è maggiormente esaltata utilizzando la
nnnnfunzionalità conveyor tracking.
nnnnQuesta funzionalità permette al robot di operare su
nnnnelementi in movimento, consentendo maggiori libertà
nnnnnella fase di studio del layout e nella realizzazione
nnnndell'impianto.
nnnnTramite il controllo ABB S4C+, l'IRB 2400 può essere
nnnninserito nelle linee di confezionamento entrando in
nnnncomunicazione con gli altri dispositivi presenti e può
nnnnessere interfacciata al sistema di visione ABB, i
nnnnPickMaster.
nnnnGrazie al software PickMaster ed alla tecnologia
nnnnCognex, il robot è in grado di prelevare i prodotti dal
nnnnsistema di trasporto in movimento depositandoli
nnnnall'interno di vassoi o blister, in movimento e gestendo
nnnnin tempo reale la distribuzione del carico fra più robot.
nnnnIRB 2400
nnnngig IRB 2400 is an anthropomorphic industrial robot
nnnnâl£ ABB, with 6 axis.
nnnnIt is mainly used for cartoning, or in general for product
nnnnpick & place operations, especially when it is necessary
nnnnto handle many components at the same time. It is
nnnnactually available in 3 versions, with a managing
nnnncapacity from 5 up to 1 ó Kg.
nnnnThanks to its operating field, it can be used on more pick-
nnnnand-place stations.
nnnnThanks to the ABB S4C+ robot control its versatility is
nnnnalso particularly enhanced by using the conveyor
nnnntracking functionality.
nnnnThis functionality allows the robot to operate on moving
nnnnelements, thus offering more freedom during the layout-
nnnnplanning phase ana during the design or the plant.
nnnnThanks to the ABB S4C+ control, the IRB 2400 can be
nnnninserted into packaging lines, communicate with other
nnnndevices and be interfaced with the ABB vision system,
nnnnthe PickMaster.
nnnnThanks to the PickMaster software and to Cognex
nnnntechnology, the robot can pick up the products from the
nnnntransport system while moving, deposit them on the
nnnnmoving trays or blisters and manage in real time the
nnnndistribution of the load among many robots.
nnnnIRB 2400
nnnn□L'IRB 2400 est un robot industrie
nnnnanthropomorphique ABB, à 6 axes.
nnnnest principalement utilisé pour applications dans le
nnnnsecteur du conditionnement et aussi, en général, pour
nnnnopérations de préhension et de dépose particulièrement
nnnnorsqu'il est impératif de manipuler plusieurs objets
nnnnsimultanément. Il est en effet disponible en trois versions
nnnnet peut gérer de 5 à 16 kg.
nnnnGrâce à son champ opérationnel, il est indiqué pour être
nnnnutilisé sur plus d'une station de préhension et de dépose.
nnnnQui plus est, sa versatilité est accrue, grâce au controle du
nnnnrobot ABB S4C+, en utilisant le mode conveyor tracking.
nnnnCe mode de fonctionnement permet au robot d'intervenir
nnnnsur des objets en mouvement ce qui permet une plus
nnnngrande liberté au moment de la conception et de la mise
nnnnau point de l'installation.
nnnnGrâce à cette unité de contrôle ABB S4C+, l'IRB 2400
nnnnpeut être intégré dans des lignes de conditionnement et
nnnnêtre branché sur d'autres dispositifs préexistant. Il peut
nnnnégalement être placé en interface avec le système de
nnnnvision ABB, le PickMaster.
nnnnGrâce au logiciel PickMaster et à la technologie
nnnnCognex, le robot est en mesure de prélever les objets du
nnnnsystème de transport qui est en mouvement et de les
nnnndéposer à l'intérieur de barquettes ou de blisters, eux
nnnnaussi en mouvement. Il peut en sus gérer en temps rée
nnnna distribution du produit entre plusieurs robots.
nnnnIRB 2400
nnnnHRB 2400 es un robot industrial antropomorfo
nnnnABB, de 6 ejes.
nnnnSe utiliza principalmente para aplicaciones de
nnnnenvoltura, o en general de "pick and place"; sobre todo
nnnnen los casos donde se solicite manipular más elementos
nnnna la vez. Está disponible 3 versiones, con capacidad
nnnnde controlar desde 5 hasta 16 kg.
nnnnGracias a su campo operativo se presta a utilizarse
nnnnsobre más de una estación "pick and place".
nnnnGracias al control robot ABB S4C+ su versatilidad se
nnnnnota aun más utilizando la función conveyor tracking.
nnnnEsta función permite al robot operar sobre elementos en
nnnnmovimiento, permitiendo mayores libertades en la fase
nnnnde estudio del layout y en el diseño de la instalación.
nnnnMediante el control ABB S4C+, IRB 2400 puede
nnnnintroducirse en las líneas de envasado entrando en
nnnncomunicación con los demás dispotivos presentes y se
nnnnpuede interconectar con el sistema de visión ABB, es
nnnndecir el PickMaster.
nnnnGracias al software PickMaster y a la tecnología
nnnnCognex, el robot está en condición de tomarlos
nnnnproductos del sistema de transporte en movimiento
nnnncolocándolos en el interior de bandejas o blister, en
nnnnmovimiento, y controlando en tiempo real la distribución
nnnnde la carga entre más de un robot.
nnnnTecno Pack
nnnn- link/ - Tol J-TO CA A Ç ^75 AAI F/w J-^O n/MÇ A79 - o-m^il- mmmfc™nnr,rltm it
nnnnTECNO PACK SpA - Via lago di Allegrie, 19 - 36015 SCHIO (Vicenza) - Italy - Tel. +39.0445.575.661 Fax +39.0445.575.672 - e-mail: comm@tecnopackspa.it
nnnnwww.tGcnopackspa.it
nnnnSOLUZIONI D'IMBALLAGGIO - PACKAGING SOLUTIONS
nnnnSOLUTIONS D'EMBALLAGE - SOLUCIONES DE ENVASADO
"