عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






SERIES-EL-940-ELECTRIC-ACTUATOR.0 pages
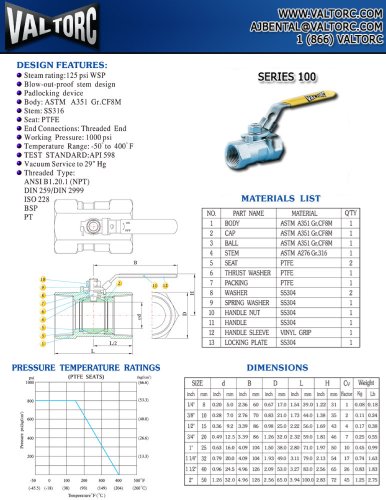
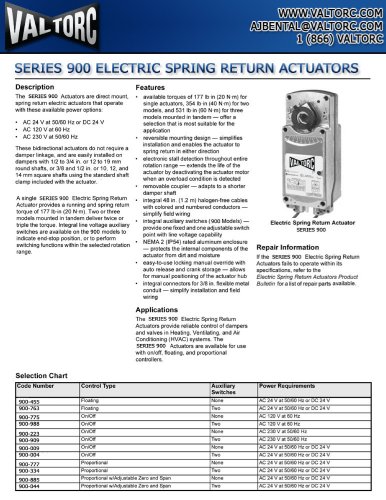
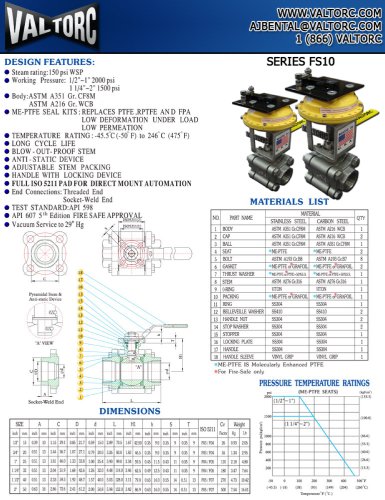
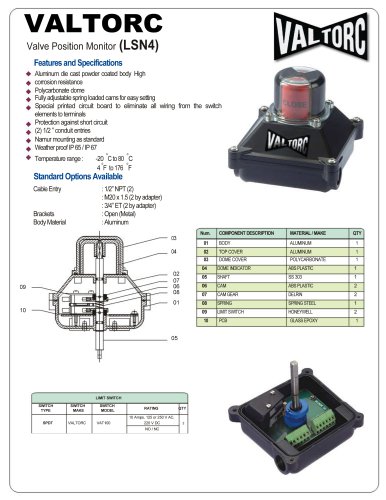
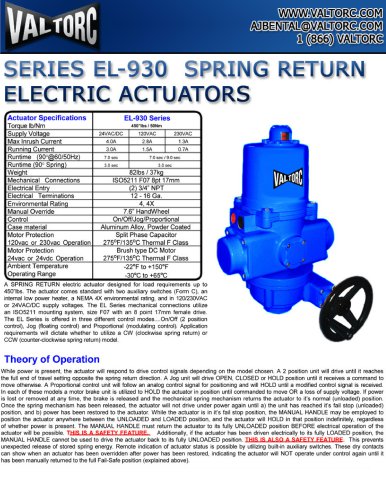
SERIES EL-940 SPRING RETURN
ELECTRIC ACTUATORS
Actuator Specifications Torque Ib/Nm | EL-940 Series 1750" lbs' 200Nm | ||
Supply Voltaqe | 24VACVDC | 120VAC | 230VAC |
Max Inrush Current | 19 OA | 11 OA | 5 6A |
Runninq Current | 9 OA | 3.8A | 2 1A |
Runtime (90 @60/50Hz) | 11 Osec | 110 sec/13 Osec | |
Runtime (90 Spnnq) | 3.0 sec | 12.0 sec | |
Weiqht | 297lbs/135kg | ||
Mechanical Connections | IS05211 F12 8pt27mm | ||
Electrical Entry | (2)3/4"NPT | ||
Electrical Terminations | 12-16 Ga. | ||
Environmental Ratinq | 4. 4X | ||
Manual Override | 15.8" HandWheel | ||
Control | On/Off/Joq/Proportional | ||
Case material | Aluminum Alloy. Powder Coated | ||
Motor Protection 120vac or 230vac Operation | Split Phase Capacitor 275°F/135°C Thermal F Claaa | ||
Motor Protection 24vac or 24vdc Operation | Brush type DC Motor 275°F/135°C Thermal F Class | ||
Ambient Temperature Operating Range | -22°F to+150°F -30°C to +65°C | ||
A SPRING RETURN electric actuator designed for load requirements up to
1750 "lbs. The actuator comes standard with two auxiliary switches (Form C), an
internal tow power heater, a NEMA 4X environmental rating, and in 120/230VAC
or 24VAC/DC supply voltages. The EL Series mechanical connections utilize
an IS05211 mounting system, size F12 with an 8 point 27mm female drive.
The EL Series is offered in three different control modes....On/Off (2 position
control), Jog (floating control) and Proportional (modulating control). Application
requirements will dictate whether lo utilize a CW (clockwise spring return) or
CCW (counter-clockwise spring return) model.
Theory of Operation
While power is present, the actuator will respond to drive control signals depending on the model chosen. A 2 position unit will drive until it
reaches the full end of travel setting opposite the spring return direction. A Jog unit will drive OPEN. CLOSED or HOLD position until it receives a
command to move otherwise. A Proportional control unit will follow an analog control signal for positioning and will HOLD until a modified control
signal is received. In each of these models a motor brake unit is utilized to HOLD the actuator in position until commanded to move OR a loss
of supply voltage. If power is lost or removed at any time, the brake is released and the mechanical spring mechanism returns the actuator to
it's normal (unloaded) position. Once the spring mechanism has been released, the actuator will not drive under power again until a) the unit
has reached it's fail stop (unloaded) position and b) power has been restored to the actuator. While the actuator is in its fail stop position, the
MANUAL HANDLE may be employed to position the actuator anywhere between the UNLOADED and LOADED position and the actuator will
HOLD in that position indefinitely, regardless of whether power is present. The MANUAL HANDLE must return the actuator to its fully UNLOADED
position BEFORE electrical operation of the actuator will be possible, THIS IS A SAFFTY FFATURE. Additionally if the actuator has been driven
electrically to its fully LOADED position, the MANUAL HANDLE cannot be used to drive the actuator back to its fully UNLOADED position, THIS
IS ALSO A SAFETY FEATURE. This prevents unexpected release of stored spring energy. Remote indication of actuator status is possible by
utilizing built-in auxiliary switches. These dry contacts can show when an actuator has been overridden after power has been restored, indicating
the actuator will NOT operate under control again until it has been manually returned to the full Fail-Safe position (explained above).
"