عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






NEW LII/ScanMaster Brochure0 pages
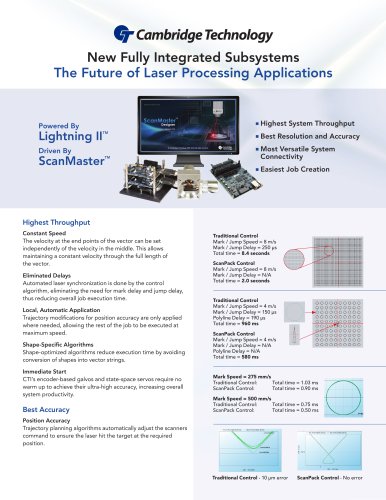
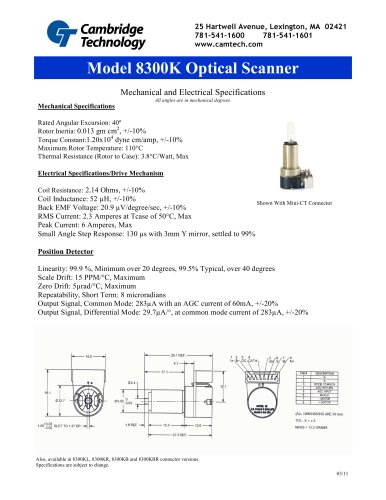
New Fully Integrated Subsystems
The Future of Laser Processing Applications
Highest System Throughput
Powered By
Lightning II
TM
Driven By
ScanMaster
TM
Best Resolution and Accuracy
Most Versatile System
Connectivity
Easiest Job Creation
Highest Throughput
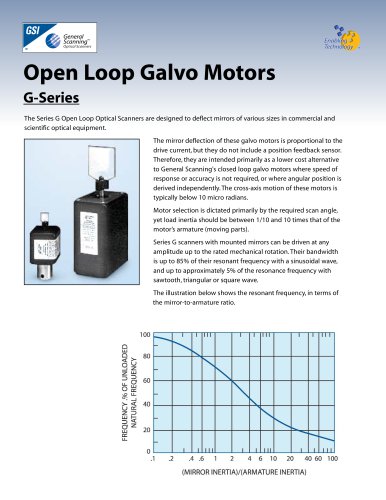
Constant Speed
The velocity at the end points of the vector can be set
independently of the velocity in the middle. This allows
maintaining a constant velocity through the full length of
the vector.
Eliminated Delays
Automated laser synchronization is done by the control
algorithm, eliminating the need for mark delay and jump delay,
thus reducing overall job execution time.
Local, Automatic Application
Trajectory modifications for position accuracy are only applied
where needed, allowing the rest of the job to be executed at
maximum speed.
Shape-Specific Algorithms
Shape-optimized algorithms reduce execution time by avoiding
conversion of shapes into vector strings.
Immediate Start
CTI’s encoder-based galvos and state-space servos require no
warm up to achieve their ultra-high accuracy, increasing overall
system productivity.
Best Accuracy
Traditional Control
Mark / Jump Speed = 8 m/s
Mark / Jump Delay = 250 µs
Total time = 8.4 seconds
ScanPack Control
Mark / Jump Speed = 8 m/s
Mark / Jump Delay = N/A
Total time = 2.0 seconds
Traditional Control
Mark / Jump Speed = 4 m/s
Mark / Jump Delay = 150 µs
Polyline Delay = 190 µs
Total time = 960 ms
ScanPack Control
Mark / Jump Speed = 4 m/s
Mark / Jump Delay = N/A
Polyline Delay = N/A
Total time = 580 ms
Mark Speed = 275 mm/s
Traditional Control:t
Total time = 1.03 ms
ScanPack Control:t
Total time = 0.90 ms
Mark Speed = 500 mm/s
Traditional Control:t
Total time = 0.75 ms
ScanPack Control:t
Total time = 0.50 ms
Position Accuracy
Trajectory planning algorithms automatically adjust the scanners
command to ensure the laser hit the target at the required
position.
Traditional Control - 10 µm error
ScanPack Control - No error
"