عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید







Brushless DC motor driver--C60-4600 pages
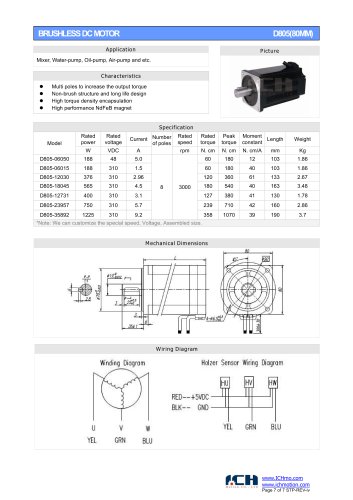
BRUSHLESS DC MOTOR DRIVER
Picture
Summarize
◆Voltage DC 24V, 36V, 48V
◆ The power drived 60W ~ 540W
◆ has a limited flow, start-up failed, blocking switch, the module protection
◆ Motor temperature detection
◆ 0-5V analog speed control
Function of Terminal block
1. Control Terminal
F/R…… High Level or no wire is CW, low level or ground is CCW
EN……. High Level or no wire as unable, low level or ground as enable
BK……. High Level or no wire is normal running, low level or ground as brakes
SV……. 0~5V Adjusting speed command’s voltage(Input resistance is 112K)
PG……. Speed pulse output(OC)
ALM….. Automatic Diagnostic Alarming output(OC)
2.
3.
4.
5.
6.
Pay attention to the control signal wire, hall signal wire and the motor’s winding, don’t make them wrap
together, otherwise it will affect the running. Long wire should be the shielded cable.
Alarming Conditions:
a. Hall signal is not right
b. Under voltage is beyond 1~3S
c. Continuous overvoltage is beyond 5~6S
d. Alarming condition can be controlled by power off one time, or unable once to reset for normal running
LED light indication
P/A…… Lightening is power on, flashing is the drivers’ alarm
SHAFT….Lightening is the motors’ shaft rotating, no lightening is the shaft stillness
Brake Control
Pay more attention: When brakes, the motor’s speed can’t not beyond safe brake speed Ns, or it will damage
the power tube
For Y winding: Ns=√3 x IpX x RLXN/ (2 x VP)
For△ winding: Ns=Ip x RL x N/ (2 x√3 x Vp)
IP=Peak current(A), RL=winding resistance(Ohm)
N=No load Speed(rpm) , Vp=Rated Voltage (V)
Ns=Speed for safe brake (rpm)
Driver’s setting
Ip>=2xlr or Ip>=4xPo/Vp,
Ip=Peak current of driver (A), Ir=motor’s rated current(A)
Po= Output power of motor (W), Vp=Driver’s rated voltage