عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






Stepper motors0 pages

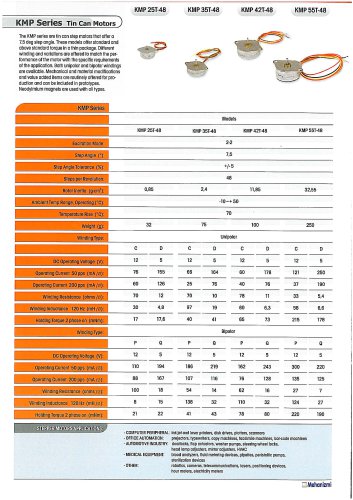
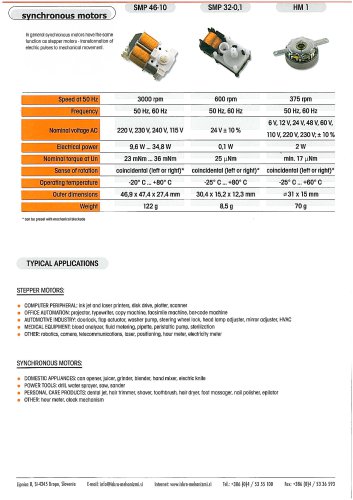
stepper motors
Transform of electric pulses to mechanical
movement is basic operation of each
electric motor. Main goal is to get as much as
possible torque out from the smallest possible
motor.
KMP 24-10
KMP 32-2
KMP 32-2/1
Steps per revolution | 10 2 2 |
Angle of step | 36° 180° 180° |
Nominal voltage DC | 5V±20% 4V±20% 2,5V...9V |
Winding resistance
350 a ± 1 %
430 Q ± 3 %
410 n
Nominal torque at Un
min. 50 jiNm
min. 20 |aNm
6}aNm at 2,5 V
20 |iNm at6V
Max pulse frequency
30 pps
3 pps
2 pps
Shape of control pulse
Sense of rotation
upon request4
upon request*
upon request"
Operating temperature
-30° C... +85° C
-40° C.... +80° C
-20° C.... +70° C
Outer dimensions
024x7 mm
30,4 x15,2 x12,3 mm
30,4 x 15,2 x 12,3 mm
' basic: right, left possible upon request.
KMP 34-2
KMP 34-2/1
NEW!!!
KMH 46-200
Steps per revolution
200
Angle of step
180c
180c
1,8C
Nominal voltage DC
1,2 V... 9 V
1,2 V... 9 V
12V
Winding resistance
480 n
480 a
27 a
Nominal torque at Un
10(iNm at 1,2 V
3,3 ^Nm at 1,2 V
13 fiNm... 21,5 jiNm
Max pulse frequency
3 pps
3 pps
1.200 pps
Shape of control pulse | |||
Sense of rotation | upon request* upon request* upon request* | |||
Operating temperature | +20° C... | +60° C +20° C | ... +60° C +5° C... + 60° C | |
Outer dimensions | 23,6 x 33 x 16,1 mm 23,6 x 33 x 16,1 mm 046 x10 mm | ||
basic: right, left possible upon request.
□J
"