عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






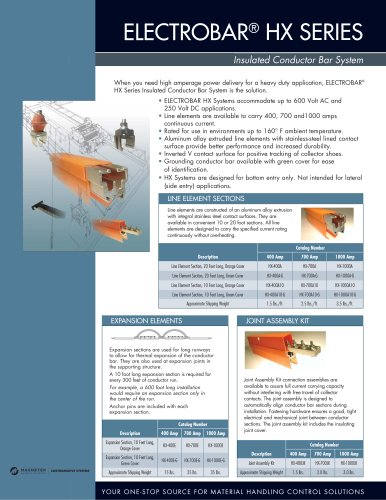
ReFlx® 1200 pages

REFLX® COLLISION
AVOIDANCE SYSTEMS
ReFlx 120 and ReFlx 120 “Plus”
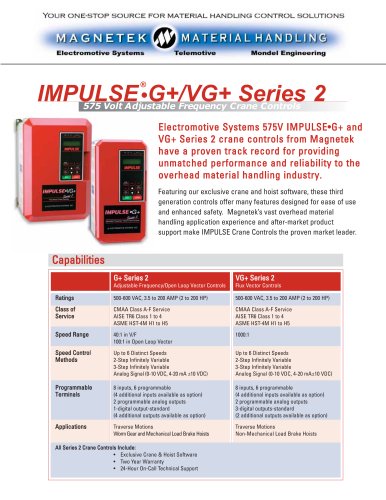
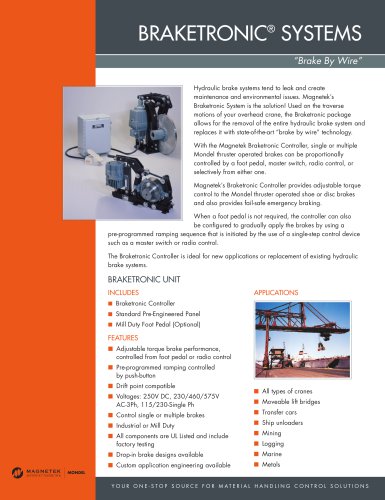
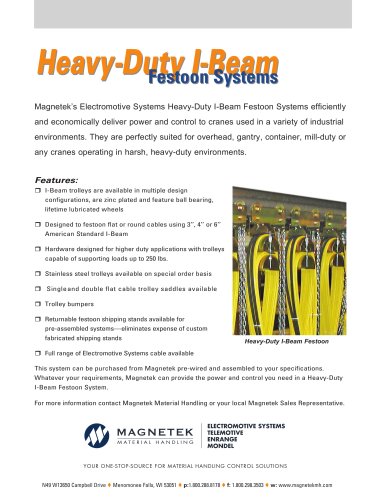
Magnetek’s ReFlx® 120 and ReFlx 120 “Plus” Distance Detection and Collision Avoidance
Systems enhance the performance of your overhead material handling system by preventing
crane to crane or crane to object collisions. Avoiding collisions means reduced maintenance
costs and increased operator safety. ReFlx Systems are ideal for use with all types of cranes
with either adjustable frequency drives or stepped controls.
ReFlx features a reliable, solid-state control board in a small, easy to install enclosure. It can
be used as a stand-alone unit, or may be removed from its enclosure and mounted as one
piece on an existing control panel.
Magnetek offers two types of ReFlx Collision Avoidance Systems.
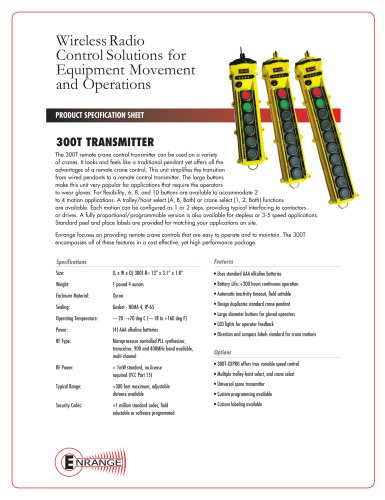
REFLX 120
The ReFlx 120 System features a two-channel infrared sensor, which can
be adjusted to give separate outputs for each channel at distances from
20 to 120 feet. The most commonly wired conguration is the use of one
channel to provide the primary stop command to the motion control, while
the second channel is used as a redundant stop command.
The system includes:
• Two-Channel Sensor
• Controller
• Diamond Reective Target (2 feet x 2 feet)
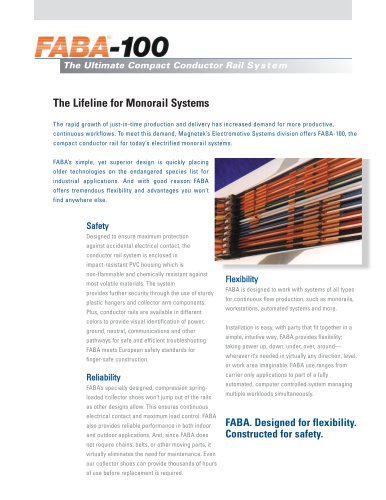
REFLX 120 “PLUS”
To provide an extra measure of safety to your collision avoidance system,
the ReFlx 120 “Plus” includes the addition of a second, shorter range,
sensor. The rst sensor, which has two channels, is most commonly
wired to use the rst channel as a “slow down” command or warning
signal, and the second channel as a primary stop command. The second
sensor has a single channel, with a range of 1.5 to 20 feet, and is most
commonly used as a redundant stop command. The second sensor does
not require a reective target to be utilized.
The system includes:
• Two-Channel Sensor
• Single-Channel Sensor
• Controller
• Diamond Reective Target (2 feet x 2 feet)
Magnetek’s ReFlx 120 and 120 “Plus” Systems keep your overhead material handling system
up and running safely by providing the ideal solution for collision avoidance.
TELEMOTIVE
Y O U R O N E - S T O P S O U R C E F O R M AT E R I A L H A N D L I N G C O N T R O L S O L U T I O N S
"