عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






Motoman MotoSim EG-VRC Simulation Software0 pages
SOLUTIONS IN MOTIO N
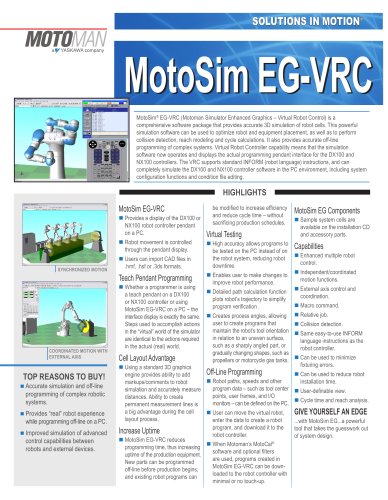
nnnnMotoSim EG-VRC MotoSim EG-VRCMotoSim >
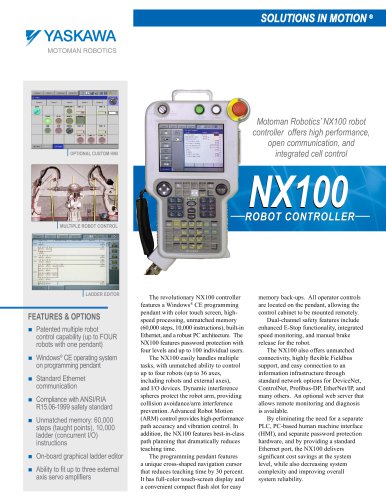
ή EG-VRC (Motoman Simulator Enhanced Graphics Virtual Robot Control) is a comprehensive software package that provides accurate 3D simulation of robot cells. This powerful simulation software can be used to optimize robot and equipment placement, as well as to perform collision detection, reach modeling and cycle calculations. It also provides accurate off-line programming of complex systems. Virtual Robot Controller capability means that the simulation software now operates and displays the actual programming pendant interface for the DX100 and NX100 controllers. The VRC supports all INFORM (robot language) instructions, and can completely simulate the DX100 and NX100 controller software in the PC environment, including system configuration functions and condition file editing. When Motoman֒s MotoCal >
HIGHLIGHTS
TOP REASONS TO BUY! MotoSim EG-VRC Increase Uptime
nnsoftware and optional filters are used, programs created in MotoSim EG-VRC can be down-
loaded to the robot controller with minimal or no touch-up. Provides a display of the DX100 or NX100 robot controller pendant on a PC. MotoSim EG-VRC reduces programming time, thus increasing uptime of the production equipment. New parts can be programmed off-line before production begins, and existing robot programs can be modified to increase efficiency and reduce cycle time Ζ without sacrificing production schedules. Robot movement is controlled through the pendant display. Users can import CAD files in .hmf, .hsf or .3ds formats. >
MotoSim EG Components
Sample system cells are available on the installation CD, including positioners and accessory parts. >
SYNCHRONIZED MOTION
MotoSim EG Viewer
Allows users to view and play back cell simulations. This free MotoSim EG HTML output file is built upon the same cutting-edge technology used by the MotoSim EG graphical interface package. It allows users to share simulations with customers or coworkers. >
nnVirtual Testing
High accuracy allows programs to be tested on the PC instead of on the robot system, reducing robot downtime. Enables user to make changes to improve robot performance. >
nnCapabilities
Enhanced multiple robot control. Detailed path calculation function plots robots trajectory to simplify programming. Independent/coordinated motion functions. Creates process angles, allowing user to create programs that maintain the robotҒs tool orientation in relation to an uneven surface, such as a sharply angled part, or gradually changing shapes, such as propellers or motorcycle gas tanks. External axis control and coordination. Macro command. >
COORDINATED MOTION WITH EXTERNAL AXIS
Teach Pendant Programming
Relative job. Whether a programmer is using a teach pendant on a DX100 or NX100 controller or using MotoSim EG-VRC on a PC the interface display is exactly the same. Steps used to accomplish actions in the ֓virtual world of the simulator are identical to the actions required in the actual (real) world. Collision detection. Robot placement and path optimization. Paint application-specific functions. >
nnAccurate simulation and off-line programming of complex robotic systems.
Conveyor tracking programming. Same easy-to-use INFORM language instructions as the robot controller. Minimize fixturing errors. >
nnProvides ԓreal robot experience while programming off-line on a PC.
Reduce robot installation time. >
nnCell Layout Advantage Off-Line Programming
User-definable view. >
nnImproved simulation of advanced control capabilities between robots and external devices.
Using a standard 3D graphics engine provides ability to add markups/comments to robot simulation and accurately measure distances. Ability to create permanent measurement lines is a big advantage during the cell layout process. Robot paths, speeds and other program data Ԗ such as tool center points, user frames, and I/O monitors can be defined on the PC. User can move the virtual robot, enter the data to create a robot program, and download it to the robot controller. Cycle time and reach analysis. >
nnGIVE YOURSELF AN EDGE
...with MotoSim EG...a powerful tool that takes the guesswork out of system design. >
"