عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






FD-V6L0 pages

FD-V6L
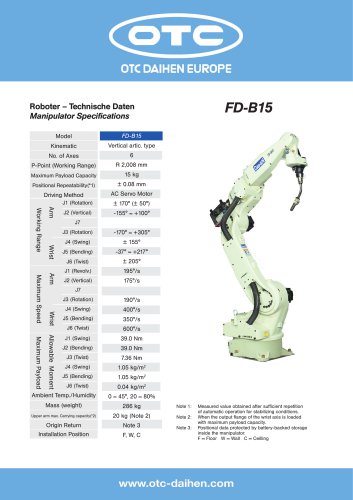
Roboter – Technische Daten
Manipulator Specifications
Model
FD-V6L
Kinematic
Vertical artic. type
No. of Axes
6
P-Point (Working Range)
R 2,006 mm
Maximum Payload Capacity
6 kg
Positional Repeatability(*1)
± 0.08 mm
Driving Method
AC Servo Motor
Arm
± 170°
J2 (Vertical)
-155° ≈ +100°
J7
Arm
-170° ≈ +260°
J4 (Rotation)
± 180°
J5 (Bending)
-50° ≈ +230°
J6 (Rotation)
± 360°
J1 (Rotation)
195°/s
J2 (Vertical)
200°/s
J7
Allowable Moment
Maximum Payload
J3 (Rotation)
Wrist
Maximum Speed
J3 (Rotation)
Wrist
Working Range
J1 (Rotation)
200°/s
J4 (Rotation)
420°/s
J5 (Bending)
420°/s
J6 (Rotation)
620°/s
J1 (Rotation)
11.8 Nm
J2 (Vertical)
9.8 Nm
J3 (Rotation)
5.9 Nm
J4 (Rotation)
0.30 kg/m2
J5 (Bending)
0.25 kg/m2
J6 (Rotation)
0.06 kg/m2
Ambient Temp./Humidity
0 ≈ 45°, 20 ≈ 80%
Mass (weight)
280 kg
Upper arm max. Carrying capacity(*2)
20 kg (Note 2)
Origin Return
Installation Position
Note 3
F, W, C
Note 1:t
t
Note 2:t
t
Note 3:t
t
t
Measured value obtained after sufficient repetition
of automatic operation for stabilizing conditions.
When the output flange of the wrist axis is loaded
with maximum payload capacity.
Positional data protected by battery-backed storage
inside the manipulator.
F = Floor W = Wall C = Ceilling