عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






Microstepping Driver 2060 pages

PiezoMotor Microstep Driver 206
•t
•t
•t
•t
Nanometer resolution
Closed loop regulation
Open loop mode
General I/O
The PMD206 is a 6-axis driver for use with Piezo LEGS
motors from PiezoMotor. The 200-series drivers are the
most advanced in the product range, giving Piezo LEGS
resolution down in the sub‑nanometer/sub‑microradian
range. Driving the motors in closed loop is possible when
reading back position from positional sensors. PMD206
supports quadrature encoders and serial SSi sensors.
Issuing a single command will guide the motor to the
exact encoder count, taking into account the parameter
settings for ramping behavior.
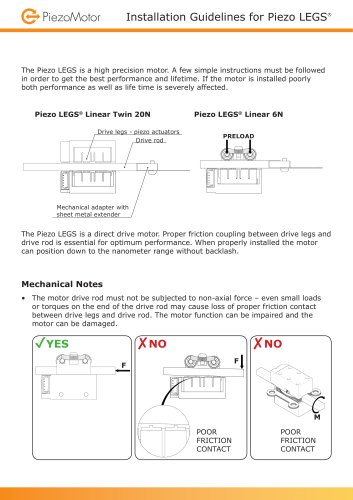
Functional principle
The driver controls the Piezo LEGS motor by feeding
waveform signals which elongates and bends each of the
piezo drive legs. The waveforms are specially designed
to make the drive legs perform a precise walking motion.
The motion of the drive legs is transferred via friction
contact to a linear rod or to a rotary disc.
For each waveform cycle the Piezo LEGS motor will
take one full step, by definition called a waveform-step
(wfm‑step). The wfm‑step length is load dependant but
in the range of a few micrometers for a linear Piezo LEGS
motor. The rotary Piezo LEGS motors have their drive
legs working on the perimeter of a drive disc. The
wfm‑step angle depends on the diameter of the rotary
motor but is usually less than one milliradian.
The generated signal waveform is made up of a large
number of voltage target points in time. Each small
voltage change will move the motor only by a fraction
of a wfm-step, defined as a microstep. The PMD206
driver gives a maximum resolution of 8192 microsteps
per full wfm-step. One microstep with highest resolution
settings equals ~0.6 nanometer (0.0006 µm) of linear
motion, or ~0.1 microradian of angular motion.
Working with the driver
The PMD206 communicates with the host (PC) via TCP/IP
or by serial 4-wire RS485. Communication with the driver
is through a protocol language (ASCII commands). The
user can run in closed loop target mode, or in open loop
mode, with full access to set resolution, step frequency
(speed) etc. Positional sensors are used to keep track of
the precise position of the Piezo LEGS motors. The driver
can read limit switches and reset at index. Ramping
parameters are set to prevent overshooting when closing
in on target in closed loop operation. The PMD206 is a
full featured driver for demanding applications.
Ordering information
Driver
PMD206
6-axis microstep driver for
Piezo LEGS motors