عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






RobSim0 pages

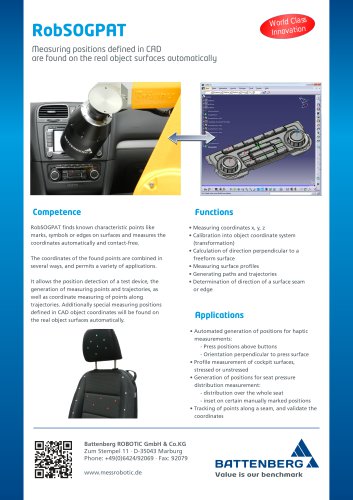
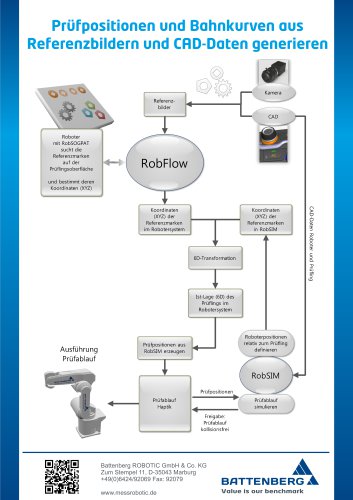
RobSim
Path generation and simulation of Measuring Robotic functions
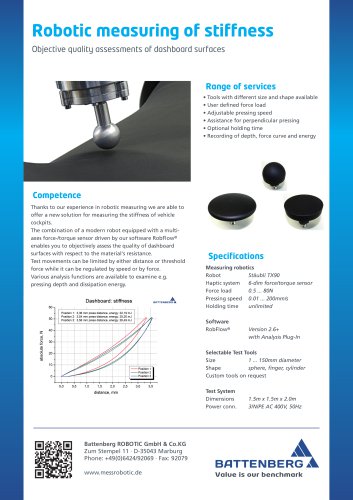
Range of services
• Simulation of path and positions
• Generation of Robot-positions and
measurement paths
• Building and testing of complete measuring
environments
• Communication via TCP/IP
Competence
RobSim allows to simulate and test the powerful
functionalities of RobFlow®2.6 without using a real robot.
Now you can build and test your RobFlow® workflows within
a simulated environment. This includes collision detection,
travel ranges and limit switches. Standard moves, multi moves
and measurement movement is possible. You can import CADData as STL-Files to build your own environment. Use the full
functionality of your simulated workflows with real robots and
vice versa.
You can still use RobFlow®2.6 in the usual way. With a TCP/IP
connection you can run RobFlow®2.6 and the simulation
visualization on different systems.
Specifications
Supported Robot Types
Mitsubishi
Stäubli
CAD-Import
via STL-files
Software Version
RobFlow®2.6
Features
Collision detection
Real robot kinematics
Battenberg ROBOTIC GmbH & Co.KG
Zum Stempel 1 1 · D-35043 Marburg
Phone: +49(0)6424/92069 · Fax: 92079
www.messrobotic.de