عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






RobPoint0 pages
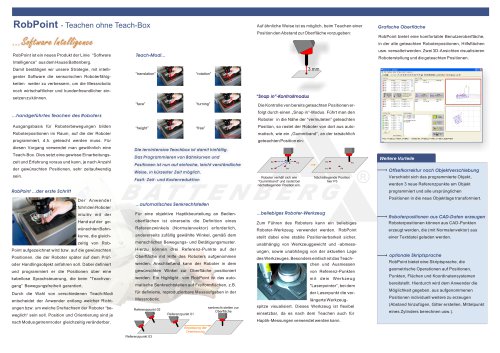
RobPoint - Teachen ohne Teach-Box
Auf ähnliche Weise ist es möglich, beim Teachen einer
Position den Abstand zur Oberfläche vorzugeben:
...Software Intelligence
Grafische Oberfläche
RobPoint bietet eine komfortable Benutzeroberfläche,
in der alle geteachten Roboterpositionen, Hilfsflächen
usw. verwaltet werden. Zwei 3D-Ansichten visualisieren
RobPoint ist ein neues Produkt der Linie “Software
Teach-Modi...
Roboterstellung und die geteachten Positionen.
Intelligence” aus dem Hause Battenberg.
genter Software die sensorischen Roboterfähig-
3 mm
z
Damit bestätigen wir unsere Strategie, mit intelli“translation”
“rotation”
y
x
keiten weiter zu verbessern, um die Messrobotic
noch wirtschaftlicher und kundenfreundlicher ein-
“Snap in”-Kontrollmodus
setzen zu können.
“face”
“turning”
y
Die Kontrolle von bereits geteachten Positionen er-
x
folgt durch einen „Snap in“-Modus. Führt man den
...handgeführtes Teachen des Roboters
Roboter in die Nähe der “vermuteten” geteachten
z
Ausgangsbasis für Roboterbewegungen bilden
“height”
Position, so rastet der Roboter von dort aus auto-
“free”
Roboterpositionen im Raum, auf die der Roboter
Freie Bewegung
programmiert, d.h. geteacht werden muss. Für
diesen Vorgang verwendet man gewöhnlich eine
Teach-Box. Dies setzt eine gewisse Einarbeitungszeit und Erfahrung voraus und kann, je nach Anzahl
der gewünschten Positionen, sehr zeitaufwendig
sein.
matisch, wie ein „Gummiband“, an der tatsächlich
geteachten Position ein:
Die lernintensive Teachbox ist damit hinfällig.
Das Programmieren von Bahnkurven und
Positionen ist nun auf einfache, leicht verständliche
Weitere Vorteile
P2
P1
P2
P3
P4
P1
P3
P4
Weise, in kürzester Zeit möglich.
Roboter verhält sich wie
“Gummiband” und rastet bei
nächstliegender Position ein.
Fazit: Zeit- und Kostenreduktion
Nächstliegende Position
hier P3
RobPoint ...der erste Schritt
Offsetkorrektur nach Objektverschiebung
Verschiebt sich das programmierte Objekt,
werden 3 neue Referenzpunkte am Objekt
programmiert und alle ursprünglichen
Der Anwender
führt den Roboter
Positionen in die neue Objektlage transformiert.
...automatisches Senkrechtstellen
intuitiv mit der
Für eine objektive Haptikbeurteilung an Bedien-
...beliebiges Roboter-Werkzeug
Hand auf der ge-
oberflächen ist einerseits die Definition eines
Zum Führen des Roboters kann ein beliebiges
Roboterpositionen können aus CAD-Punkten
wünschten Bahn-
Referenzwinkels (Normalenvektor) erforderlich,
Roboter-Werkzeug verwendet werden. RobPoint
erzeugt werden, die (mit Normalenvektor) aus
kurve, die gleich-
andererseits zufällig gewählte Winkel, gemäß dem
stellt dabei eine stabile Positionierbarkeit sicher,
einer Textdatei geladen werden.
zeitig von Rob-
menschlichen Bewegungs- und Betätigungsmuster.
unabhängig von Werkzeuggewicht und -abmess-
Point aufgezeichnet wird bzw. auf die gewünschten
Hierzu können drei Referenz-Punkte auf der
ungen, sowie unabhängig von der aktuellen Lage
Positionen, die der Roboter später auf dem Prüf-
Oberfläche mit Hilfe des Roboters aufgenommen
oder Handlingsobjekt anfahren soll. Dabei definiert
werden. Anschließend kann der Roboter in dem
des Werkzeuges. Besonders einfach ist das Teachchen und Ausmessen
und programmiert er die Positionen über eine
gewünschten Winkel zur Oberfläche positioniert
von Referenz-Punkten
kabellose Sprachsteuerung, die beim “Teachvor-
werden. Ein Highlight von RobPoint ist das auto-
mit dem Werkzeug
gang” Bewegungsfreiheit garantiert.
matische Senkrechtstellen auf Freiformflächen, z.B.
"Laserpointer”, bei dem
Durch die Wahl von verschiedenen Teach-Modi
für definierte, reproduzierbare Messaufgaben in der
der Laserpunkt die ver-
entscheidet der Anwender entlang welcher Richt-
Messrobotic.
längerte Werkzeug-
ungen bzw. um welche Drehachsen der Roboter “be-
Referenzpunkt 02
Referenzpunkt 01
weglich“ sein soll. Position und Orientierung sind je
senkrecht stellen zur
Oberfläche
Anpassung der
Orientierung
Referenzpunkt 03
optionale Skriptsprache
RobPoint bietet eine Skriptsprache, die
geometrische Operationen auf Positionen,
Punkten, Flächen und Koordinatensystemen
bereitstellt. Hierdurch wird dem Anwender die
Möglichkeit gegeben, aus aufgenommenen
Positionen individuell weitere zu erzeugen
spitze visualisiert. Dieses Werkzeug ist flexibel
(Abstand hinzufügen, Gitter erstellen, Mittelpunkt
einsetzbar, da es nach dem Teachen auch für
eines Zylinders berechnen usw.).
Haptik-Messungen verwendet werden kann.
nach Modus getrennt oder gleichzeitig veränderbar.
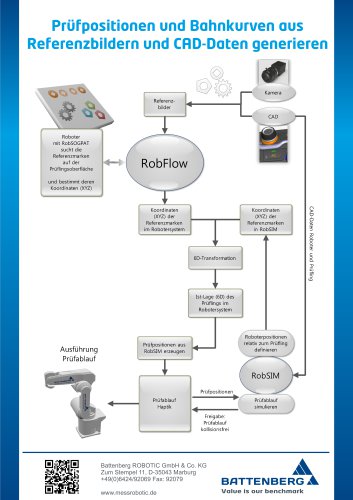
Roboterpositionen aus CAD-Daten erzeugen
"