عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






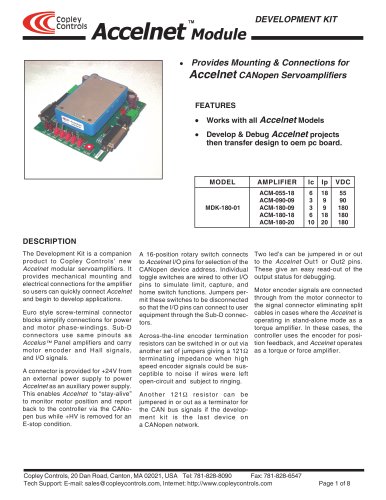
Accelnet Plus EtherCAT 2-Axis Module0 pages

PRELIMINARY
Model
Ic
Ip
Vdc
AE2-090-06
3
6
90
AE2-090-14
7
14
90
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547
Web: www.copleycontrols.com Page 1 of 12
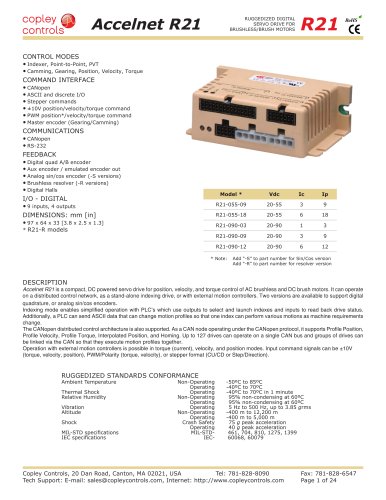
Accelnet Plus 2-Axis Module EtherCATRoHS
AE2
CopleyControls
Seventeen high-speed digital inputs with programmable functions are provided, and two low-speed inputs for motor temperature switches.
An SPI (Serial Peripheral Interface) function is supported by another high-speed input and four high-speed digital outputs. If not used for SPI, the input and outputs are programmable for other functions. Three open-drain MOSFET outputs can drive loads powered up to 24 Vdc.
An RS-232 serial port provides a connection to Copley’s CME2 software for commissioning, firmware upgrading, and saving configurations to flash memory.
Drive power is transformer-isolated DC from regulated or unregulated power supplies. An AuxHV input is provided for “keep-alive” operation permitting the drive power stage to be completely powered down without losing position information, or communications with the control system.
descriptiodescriptio
n
Accelnet AE2 is a dual-axis, high-performance, DC powered servo drive for position, velocity, and torque control of brushless and brush motors via EtherCAT, an Ethernet-based fieldbus. Using advanced FPGA technology, the AE2 provides a significant reduction in the cost per node in multi-axis EtherCAT systems.
Each of the two nodes in the AE2 operates as an EtherCAT slave using the CANopen over EtherCAT (CoE) protocol of DSP-402 for motion control devices. Supported modes include: Cyclic Synchronous Position-Velocity-Torque, Profile Position-Velocity-Torque, Interpolated Position Mode (PVT), and Homing.
Command sources also include ±10V analog velocity/torque, PWM velocity/torque, and stepper command pulses.
Feedback from a number of incremental and absolute encoders is supported.
Control Modes
• Cyclic Synchronous Position, Velocity, Torque
• Indexer, Point-to-Point, PVT
• Camming, Gearing
Command Interface
• EtherCAT
• ASCII and discrete I/O
• Stepper commands
• ±10V position/velocity/torque command
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communications
• EtherCAT (CANopen over EtherCAT)
• RS-232
Feedback
Incremental
• Digital quad A/B encoder
• Analog sin/cos encoder
• Digital Halls
Absolute encoders
• SSI
• EnDat 2.1 & 2.2
• Absolute A
• BiSS
I/O
• Digital: 20 inputs, 7 outputs
• Analog: 2 inputs
Dimensions: mm [in]
• 114 x 73 x 20.6 [4.5 x 2.9 x 0.8]