عضویت
عضویت  ورود اعضا
ورود اعضا راهنمای خرید
راهنمای خرید






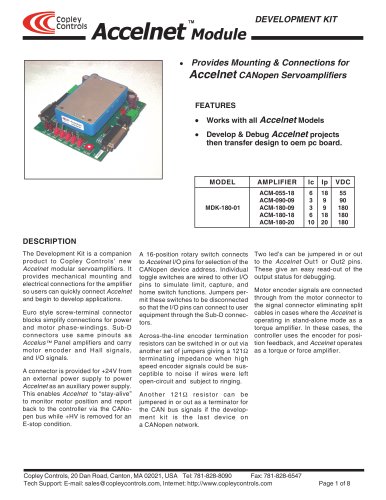
Accelnet Module0 pages

RoHS
Model *
Vdc
Ic
Ip
ACM-055-18
20 - 55
6
18
ACM-090-09
20 - 90
3
9
ACM-090-24
20 - 90
12
24
ACM-180-09
20 - 180
3
9
ACM-180-18
20 - 180
6
18
ACM-180-20
20 - 180
10
20
Copley Controls, 20 Dan Road, Canton, MA 02021, USA Tel: 781-828-8090 Fax: 781-828-6547
Web: www.copleycontrols.com Page 1 of 14
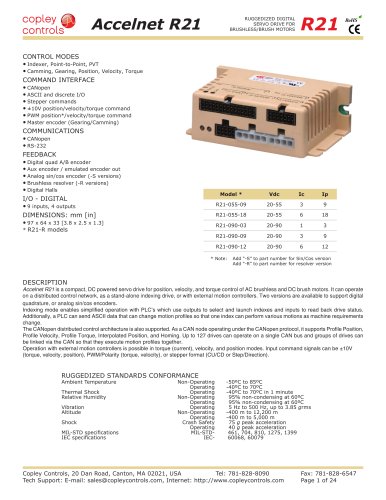
DIGITAL SERVO DRIVE
for BRUSHLESS/BRUSH MOTORS
Accelnet Module
Control Modes
Indexer, Point-to-Point, PVT
• • Camming, Gearing, Position, Velocity, Torque
Command Interfaceterface
CANopen
• • ASCII and discrete I/O
• Stepper commands
• ±10 Vdc analog position/velocity/torque *
• PWM velocity/torque command
• Master encoder (Gearing/Camming)
Communicatioications
CANopen
• • RS-232
Feedback
Digital Quad A/B encoder
• • Secondary encoder / emulated encoder out
• Brushless resolver (-R option)
• Digital Halls
I/O - Digitaligital
10 inputs, 2 outputs•
Dimensions: mm [in]
102 x 69 x 25 [4.0 x 2.7 x 1.0]•
* Available on RoHS versions
descriptiodescriptio
n
Accelnet is a digital servo drive that combines CANopen networking
with 100% digital control of brush or brushless motors in a pc board mounting package with power options to 10 Adc continuous and 20 Adc peak from 20 Vdc to 180 Vdc power supplies.
RoHS compliance is now standard on all models and with this a ±10 Vdc analog input has been added for position/velocity/torque control. The input takes the place of signal ground pins on non RoHS models so that RoHS types can be installed in place of non RoHS types with no change in function.
Accelnet operates as a Motion Control Device using the DSP-402 protocol under the CANopen DS-301 V4.01 (EN 50325-4) application
layer. DSP-402 modes supported include Interpolated Position
(PVT), Profile Position, Profile Velocity, Profile Torque, and Homing.
Ten logic inputs are configurable as CAN address bits, enables, limit & home switches, motor temperature switch, stepper/encoder pulses, and reset. There are two logic outputs for reporting drive status, or driving a motor brake.
In addition to CANopen motion commands, Accelnet can operate using incremental position commands from step-motor controllers in Pls/Dir or CW/CCW format, as well as A/B quadrature commands from a master-encoder which can drive cam tables or be geared to ratio the drive position to that of the master-encoder.
Drive commissioning is facilitated by CME 2™ software operating under Windows® communicating with Accelnet via an RS-232 link. Auto-tuning algorithms in CME 2™ slash set up times for fast system commissioning by automating motor phasing, and current-loop tuning. A powerful oscilloscope and waveform generator display drive performance for fine tuning. Drive configurations are saved in non-volatile flash memory. OEM’s can inventory one part, and configure drives on-site to each axis in a machine.
Space-vector modulation delivers higher motor speeds and lower motor power dissipation than conventional sine-pwm modulation. Carrier-cancellation modulation all but eliminates motor ripple current and dissipation at a standstill. Current-loop sampling is at 15 kHz, position and velocity loops at 3 kHz and PWM ripple at 30 kHz.
All drive circuits are DC coupled and operate from unregulated transformer-isolated linear DC power supplies, or regulated switching
power supplies.
The PC board mounting package is suitable for high density, multi-axis installations in equipment where space is at a premium, and wiring must be minimized.
Add -R to part numbers above for resolver feedback